クイックスタート
下図のような「2自由度ロボットアーム」の運動解析を題材にしながら、チュートリアル形式でLagrancia Kinematicsの使い方を説明していきます。
なお、このチュートリアルは、マルチボディ運動学解析に関する基本知識をお持ちの方を対象としています。
プロジェクト作成
アプリ起動直後はスタートページが表示されます。このチュートリアルでは、新規にプロジェクトを作成します。

スタートページ画面右下の「新しいプロジェクトを作成する」ボタンを押し、新しく作成するプロジェクトの名前を入力します。 このチュートリアルでは「2自由度ロボットアーム」という名前をつけます。
名前を入力後、OKボタンを押すと、メインウィンドウが開きます。
ボディとジョイントの定義
ボディ(剛体)とジョイントの定義をします。Lagrancia Kinematicsでは、これらの定義情報をMBS(Multi Body System)情報と呼んでいます。

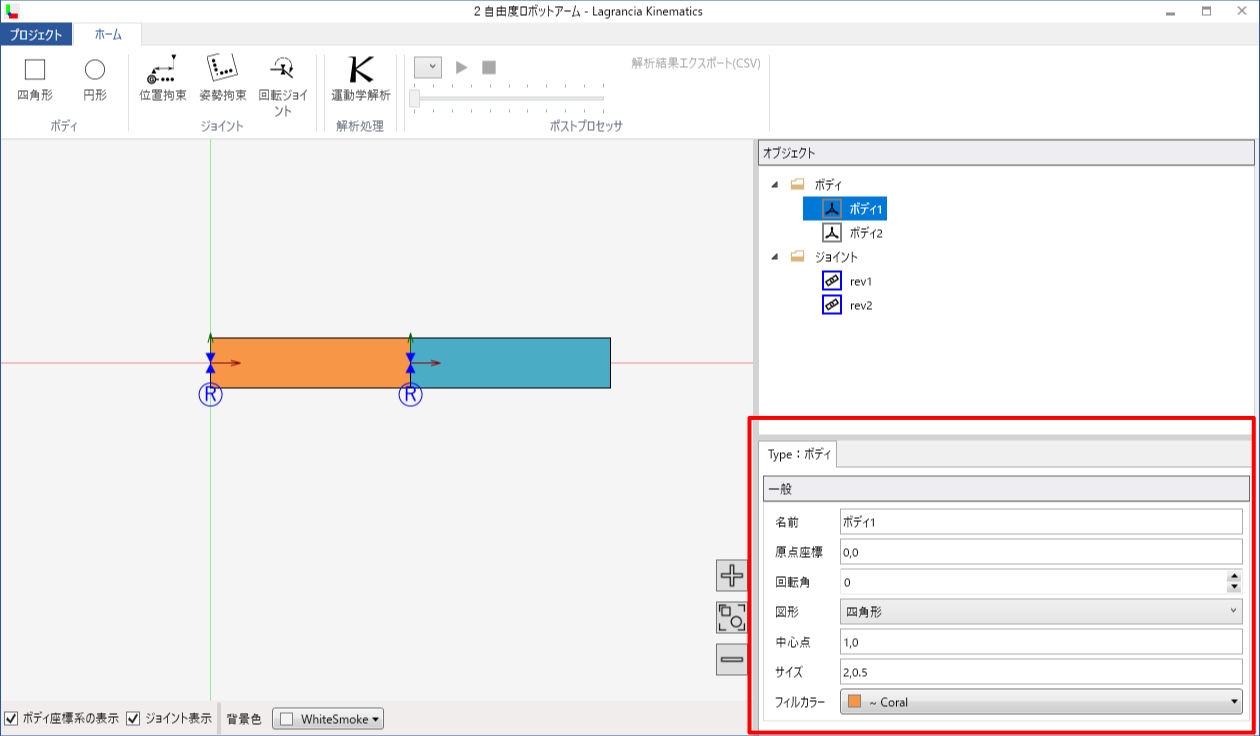
まず、1つ目のボディを追加します。ボディ追加ボタンを押して、追加ダイアログを表示し、図のように項目を入力します。

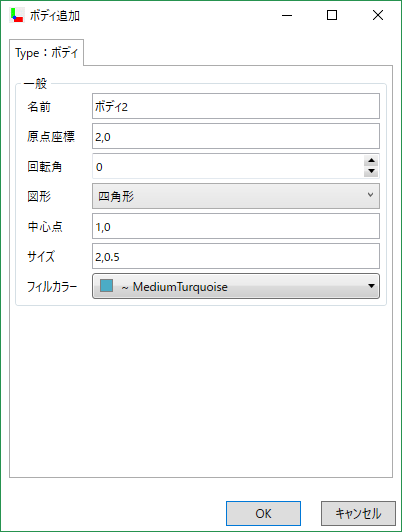
| 名前 | MBS情報全体で一意になる要素名。50文字以内。 |
|---|---|
| 原点座標 | ボディ座標系の原点位置【絶対座標系】。{x,y} 形式で入力します。 |
| 回転角 | ボディ座標系の姿勢【反時計回りを+】。絶対座標系のx軸を基準にしたボディ座標の傾きを表します。単位はdeg |
| 図形 | 表示するボディの形状を決定します。(四角形 or 円形) |
| 中心点 | 「図形」の中心点座標【ボディ座標系】。{x,y} 形式で入力します。 |
| サイズ | 「図形」の幅と高さ。{幅,高さ} 形式で入力します。 |
| フィルカラー | 「図形」の塗りつぶし色 |
続いて、2つ目のボディを追加します。再度、ボディ追加ボタンを押して、図のように追加ダイアログに入力します。
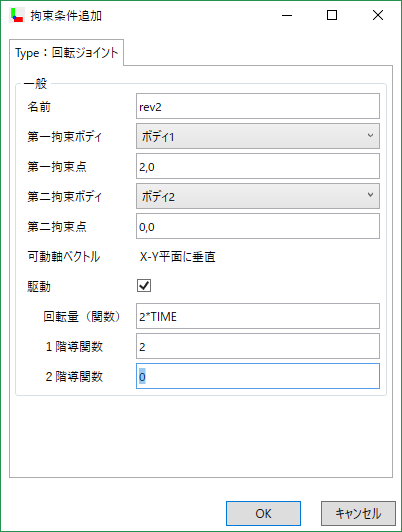
次に、ジョイントの追加を行います。回転ジョイント追加ボタンを押して、図のように追加ダイアログに入力します。

| 名前 | MBS情報全体で一意になる要素名。50文字以内。 |
|---|---|
| 第一拘束ボディ | 拘束する一方のボディ。リストボックスから選択します。 |
| 第一拘束点 | 拘束点座標【ボディ座標系】 |
| 第二拘束ボディ | 拘束する他方のボディ。リストボックスから選択します。 |
| 第二拘束点 | 拘束点座標【ボディ座標系】 |
| 駆動 | 当該ジョイントに、駆動拘束を付与する場合にチェックをつけます。チェックを付けることで、駆動情報が入力可能状態になります。 |
| 回転量(関数) | 回転量を表す式を入力します。 |
| 1階導関数 | 回転量関数の1階導関数 |
| 2階導関数 | 回転量関数の2階導関数 |
続いて、2つ目のジョイントを追加します。再度、回転ジョイント追加ボタンを押して、図のように追加ダイアログに入力します。
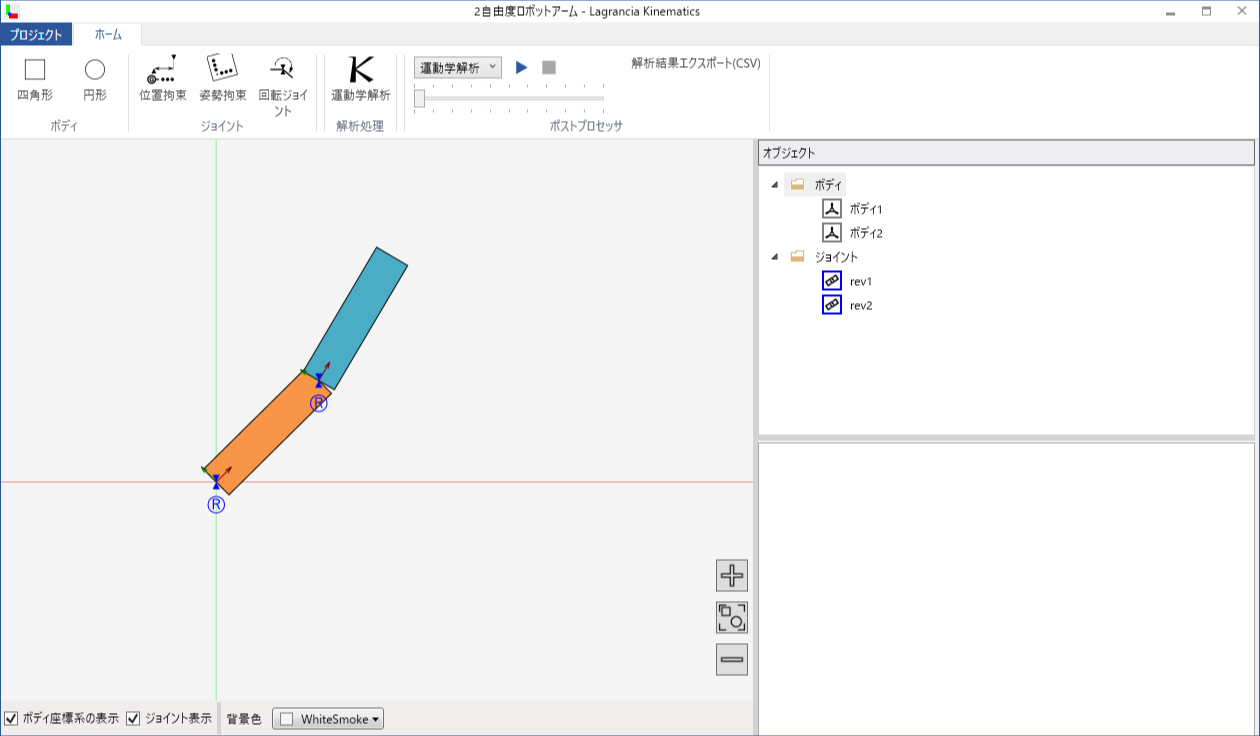
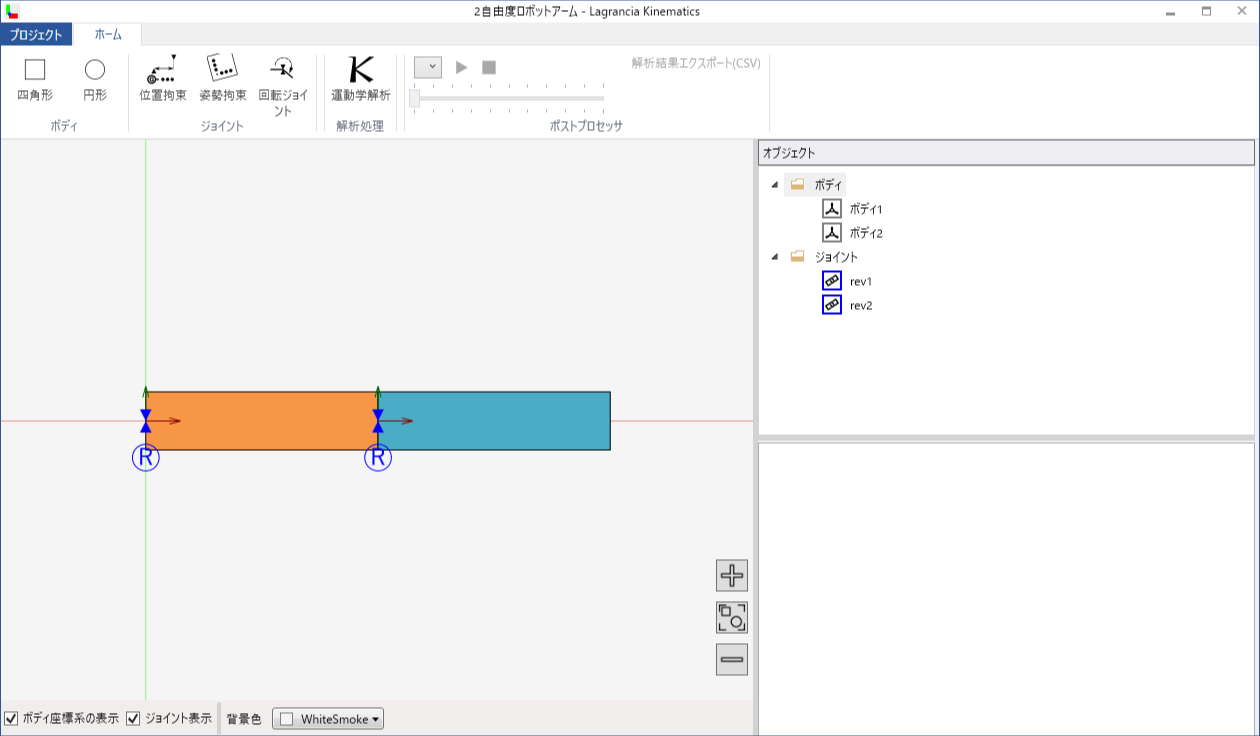
2つのボディと2つの回転ジョイントの定義が終えると、下の図のようになります。
定義済みの要素を変更
右ペインのアウトライナー上で変更したい要素を左クリックし、右下に表示されるパネルにて変更します。
定義済みの要素を削除
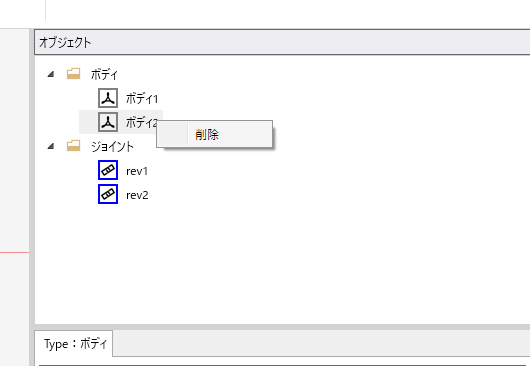
右ペインのアウトライナー上で削除したい要素を右クリックしてコンテキストメニューを表示し、「削除」を選択します。
解析の設定
解析対象となるMBS情報の定義が終えたところで、解析を行います。
解析ボタンを押して、図のように解析パラメータダイアログを入力します。 入力後、解析開始ボタンを押すと解析が開始されます。
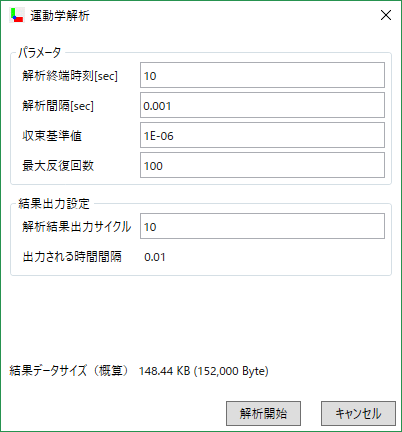
| 解析終端時刻 | 解析の範囲を指定します。0秒時点から解析終端時刻までに関して解析を行います。 |
|---|---|
| 解析間隔 | 解析の間隔を指定します。単位は秒です。 |
| 収束基準値 | ニュートン=ラフソン法の収束基準値を指定します。 |
| 最大反復回数 | ニュートン=ラフソン法の最大反復回数を指定します。 |
| 結果出力サイクル | 解析結果の出力頻度を調整します。ここで指定したサイクルで出力します。 |
| 出力される時間間隔 | 出力される解析結果データの時間間隔を表します。これは解析間隔×結果出力サイクルから算出されます。 |
処理結果の表示アニメーション
前述の解析処理で解析結果が得られたなら、解析結果に関するボタンが押せるようになります。
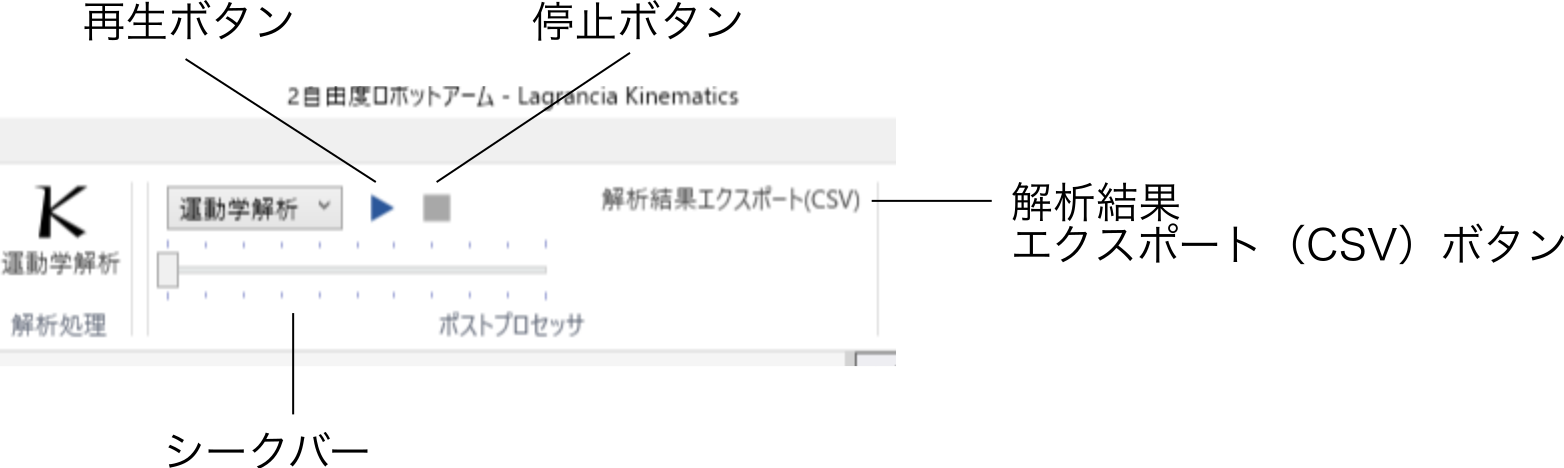
再生ボタンを押すと、解析の結果(各ボディの位置と姿勢)の情報を元に、アニメーションが開始されます。
処理結果のエクスポート
解析結果エクスポート(CSV)ボタンは、解析結果情報をcsvファイルとして、エクスポートします。
出力例
