ソルバ 概要
定義されたMBSについて運動学解析を行います。 具体的には、解析始端時刻(0秒固定)から指定された終端時刻までの間の各ボディの位置・速度・加速度を算出します。
Lagrancia Kinematicsでは、ある時刻における位置・速度・加速度について次のような手順で求めています。
- 位置解析:運動学的拘束の非線形方程式の解を、ニュートン=ラフソン法を用いて求めます。
- 速度解析:運動学的拘束の速度方程式を解いて求めます。
- 加速度解析:運動学的拘束の加速度方程式を解いて求めます。
解析を行うには、コントロールバーの「運動学解析ボタン」をクリックし、運動学解析ダイアログを表示します。
解析のヒント
運動学解析が可能なMBSが定義されていない場合は解析エラーとなります。例えば、MBSの定義情報に基づいて構築する運動学的拘束の非線形方程式が数値計算で解けない場合や、 速度方程式、加速度方程式が数値計算で解けない場合などは解析エラーとなります。
Lagrancia Kinematicsでは、解析開始時に簡易的なチェックだけ行っています。 解析開始時に
『MBS全体の自由度(3×ボディの数) < すべてのジョイントの運動学的拘束数の総数』
を満たしてない場合は、解析エラーとなります。
MBSで定義するジョイントの数と、運動学的拘束数は異なるため注意が必要です。 Lagrancia Kinematicsで扱うジョイントと運動学的拘束数の関係は下表のとおりです。
| 位置拘束(X軸) | 拘束数:1 |
|---|---|
| 位置拘束(Y軸) | 拘束数:1 |
| 姿勢拘束 | 拘束数:1 |
| 固定拘束 | 拘束数:3 |
| 距離拘束 | 拘束数:1 |
| 回転ジョイント(駆動OFF) | 拘束数:2 |
| 回転ジョイント(駆動ON) | 拘束数:3 |
| 直動ジョイント(駆動OFF) | 拘束数:2 |
| 直動ジョイント(駆動ON) | 拘束数:3 |
| 歯車拘束 | 拘束数:1 |
運動学解析ダイアログ
解析に必要な情報を入力します。入力後、解析開始ボタンをクリックすることで解析処理が開始されます。
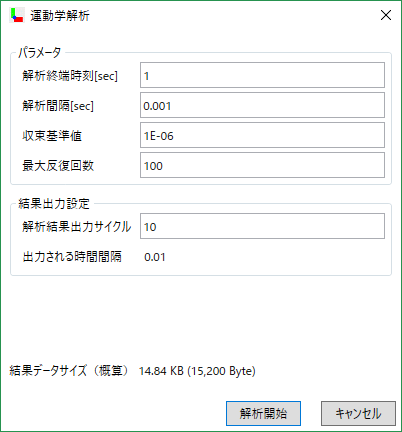
| 解析終端時刻 | 解析の範囲を指定します。0秒時点から解析終端時刻までに関して解析を行います。 |
|---|---|
| 解析間隔 | 解析の間隔を指定します。単位は秒です。 |
| 収束基準値 | ニュートン=ラフソン法の収束基準値を指定します。 |
| 最大反復回数 | ニュートン=ラフソン法の最大反復回数を指定します。 |
| 結果出力サイクル | 解析結果の出力頻度を調整します。ここで指定したサイクルで出力します。 |
| 出力される時間間隔 | 出力される解析結果データの時間刻み幅を表します。これは解析間隔×結果出力サイクルから算出されます。 図の例の場合、解析結果(各ボディの位置・速度・加速度の情報)が0.01秒間隔で出力されます。 |