プリプロセッサ - ボディ定義
定義されたボディは剛体(内外部から力が働いたとしても全く変形しない仮想的な物体)として扱います。 Lagrancia Dynamicsでは基本図形ボディと、凸多角形ボディの2つのタイプが用意されています。
基本図形ボディ(円形・四角形)
基本図形ボディは図形の"幅"と"高さ"を指定し、円形または四角形を表現するボディです。その形状はいつでも円形または四角形に変更できます。
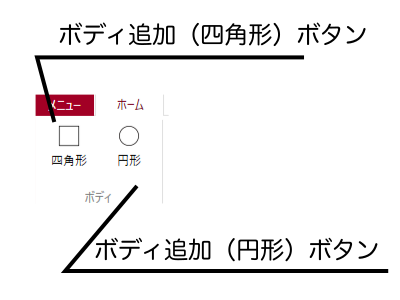
基本図形ボディの追加はコントロールバーの「四角形追加ボタン」または、「円形追加ボタン」から行います。 (2つのボタンがありますが、あまり違いはありません。追加用ダイアログ上の「図形」項目の初期選択状態が変化するだけです。)
【Type:ボディタブ】
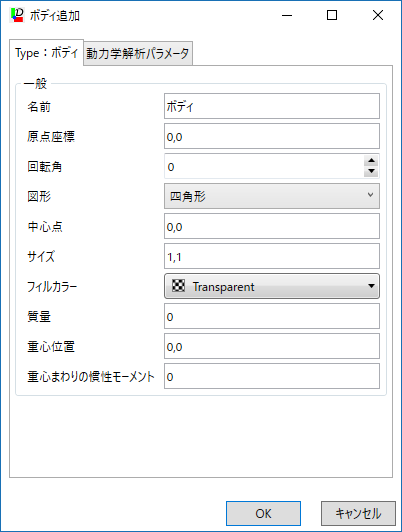
- 名前
- MBS情報全体で一意になる要素名。50文字以内。
- 原点座標
- ボディ座標系の原点位置【絶対座標系】。{x,y} 形式で入力します。
- 回転角
- ボディ座標系の姿勢を表します(反時計回りを正)。絶対座標系のx軸を基準にしたボディ座標の傾きを表します。 単位は$\mathrm{deg}$です。
- 図形
- 表示するボディの形状を決定します。(四角形 or 円形)
- 中心点
- 「図形」の中心点座標【ボディ座標系】。{x,y} 形式で入力します。
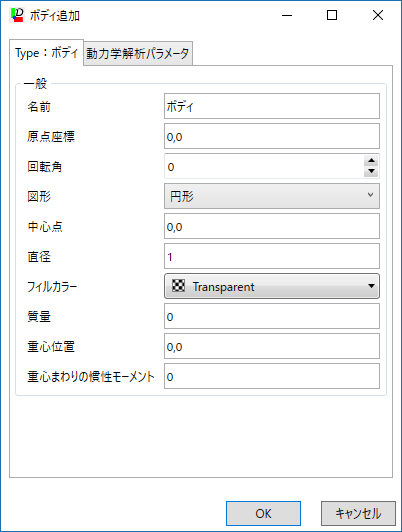
- サイズ or 直径
- 図形の選択状況で項目名が変化します。
「図形」が”四角形”のとき、「サイズ」になります。四角形の幅と高さを{幅,高さ} 形式で入力します。
「図形」が”円形”のとき、「直径」になります。円の直径を入力します。
- フィルカラー
- 「図形」の塗りつぶし色
- 質量
- ボディの質量。
- 重心位置
- ボディの重心座標【ボディ座標系】。{x,y} 形式で入力します。
- 重心まわりの慣性モーメント
- ボディの重心を通り、X-Y軸平面に垂直な軸(=Z軸)まわりの慣性モーメント。単位は$\mathrm{kg\,m^2}$です。


【動力学パラメータタブ】
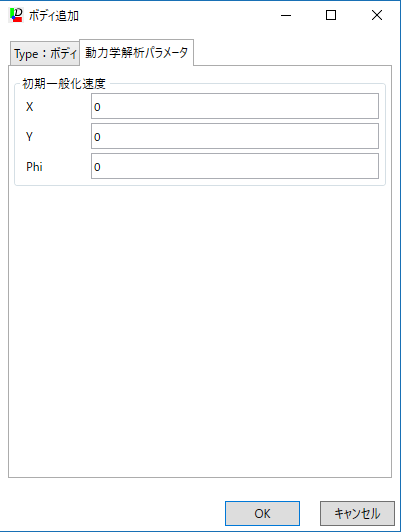
- 初期一般化加速度 X,Y,Phi
- 動力学解析時の初期時刻における一般化加速度を入力します。 Xおよび、Yの単位は$\mathrm{m/sec}$です。Phiの単位は、$\mathrm{rad/sec}$です。
凸多角形ボディ
凸多角形ボディは複数の頂点を凸包する図形を表現するボディです。 図形情報となる頂点情報は別途、凸多角形シェイプを定義します。
基本図形ボディの追加はコントロールバーの「凸多角形追加ボタン」から行います。
【Type:ボディタブ】(凸多角形用)
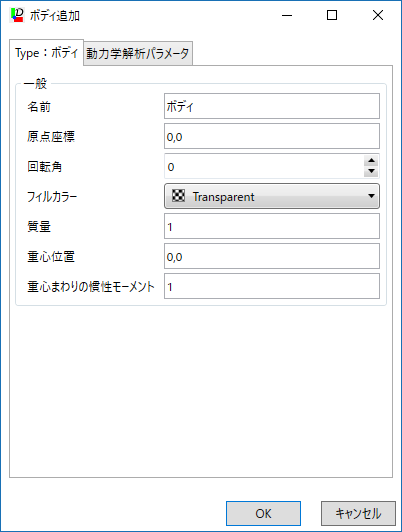
- 名前
- MBS情報全体で一意になる要素名。50文字以内。
- 原点座標
- ボディ座標系の原点位置【絶対座標系】。{x,y} 形式で入力します。
- 回転角
- ボディ座標系の姿勢を表します(反時計回りを正)。絶対座標系のx軸を基準にしたボディ座標の傾きを表します。 単位は$\mathrm{deg}$です。
- フィルカラー
- 「図形」の塗りつぶし色
- 質量
- ボディの質量。
- 重心位置
- ボディの重心座標【ボディ座標系】。{x,y} 形式で入力します。
- 重心まわりの慣性モーメント
- ボディの重心を通り、X-Y軸平面に垂直な軸(=Z軸)まわりの慣性モーメント。単位は$\mathrm{kg\,m^2}$です。
【動力学パラメータタブ】
- 初期一般化加速度 X,Y,Phi
- 動力学解析時の初期時刻における一般化加速度を入力します。 Xおよび、Yの単位は$\mathrm{m/sec}$です。Phiの単位は、$\mathrm{rad/sec}$です。
凸多角形シェイプ
凸多角形シェイプは凸包図形を表現します。
アウトライナー上では、凸多角形ボディとして定義した「ボディ要素」の下層に表示されます。
凸多角形シェイプは凸多角形ボディを追加した際に自動作成されます。
(初期状態は、{1,0},{0,1},{-1,0}の三角形)
- 頂点座標は凸多角形ボディのボディ座標系上で定義します。
- 3つ以上の頂点情報が必要です。
- 複数の頂点座標のうち、凸包の内側に位置する頂点は無視します。

【Type:凸多角形タブ】
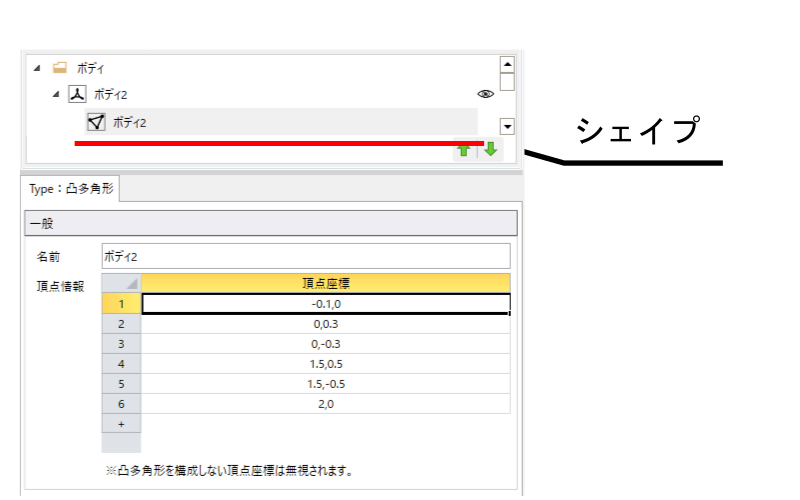
- 名前
- MBS情報全体で一意になる要素名。50文字以内。
- 頂点情報
- 頂点座標【ボディ座標系】。{x,y} 形式で入力します。