プリプロセッサ - 接触条件 定義
ボディ間の接触(あるいは衝突)に関する情報です。Lagrancia Dynamicsでは、接触条件を規定しているボディ間でのみ接触に関する計算を行います。
接触条件は、指定された2つのボディ間の接触に関する情報です。
Lagrancia Dynamicsでは、接触条件を規定しているボディ間でのみ接触に関する計算を行います。
この接触条件で指定された2つボディがX-Y平面上で重なったとき、接触が発生したと判断します。発生する接触力の計算には「弾性接触法」が用いられます。
弾性接触法では、接触時貫通量$\delta$に応じて接触力が計算されます。
ボディ外郭線上に存在する接触点における法線方向接触力$f_N$、および接線方向接触力$f_T$は次の式で計算されます。
\begin{eqnarray*}
f_N & = & K\delta^{m_1} + D\frac{\dot{\delta}}{|\dot{\delta}|}|\dot{\delta}|^{m_2}\delta^{m_3} \\
f_T & = & -\mu f_N \mathrm{sign}(\dot{g}_T)
\end{eqnarray*}
\begin{eqnarray*}
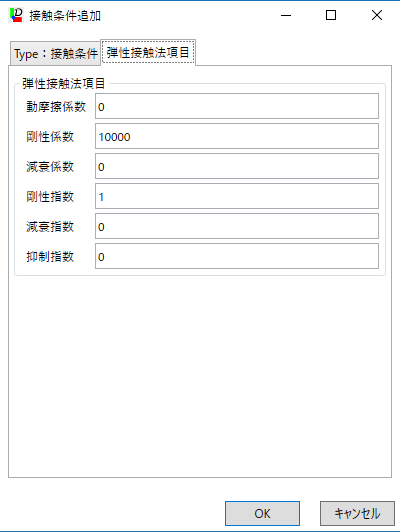
K & : & 剛性係数 \\
D & : & 減衰係数 \\
\delta& : & 貫通量 \\
m_1 & : & 剛性指数 \\
m_2 & : & 減衰指数 \\
m_3 & : & 抑制指数 \\
\mu & : & 動摩擦係数 \\
\dot{g}_T & : & 両接触点の接線方向の相対速度 \\
\end{eqnarray*}
※$\mathrm{sign}$は符号関数
接触条件の追加はコントロールバーの「接触条件追加ボタン」から行います。
接触条件

【Type:接触条件】
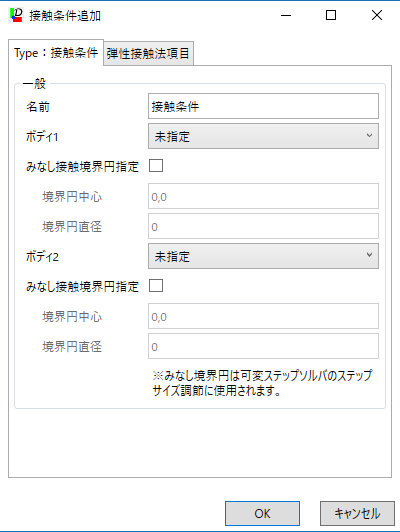
初期状態はボデイを覆う円が自動設定されます。
「みなし境界円指定」チェックボックスをONにすることで、自由に設定できます。
【Type:弾性接触法項目】